How to Setup the Arduino IDE to Work with the Tinusaur Boards
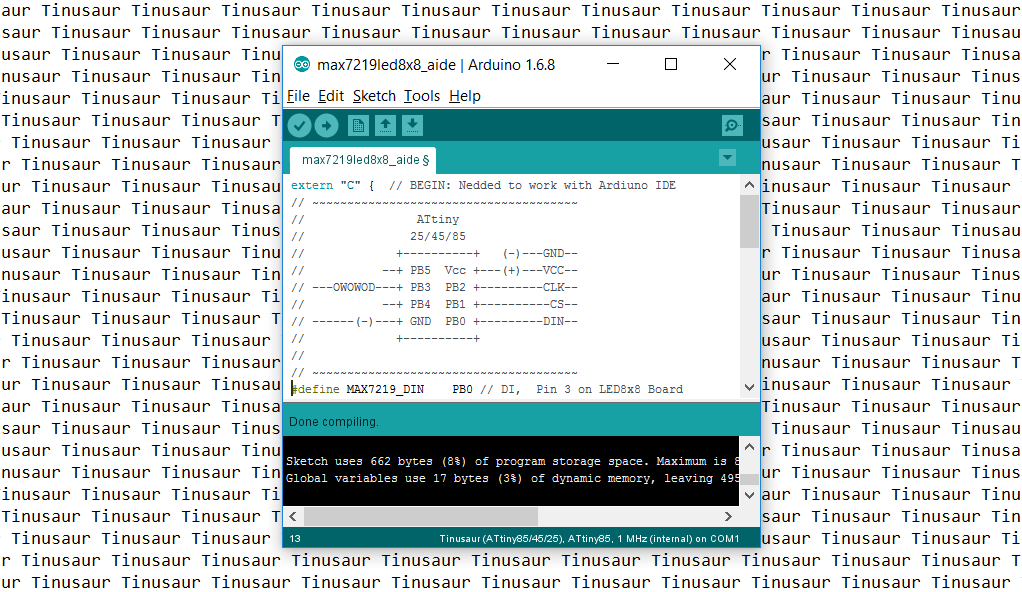
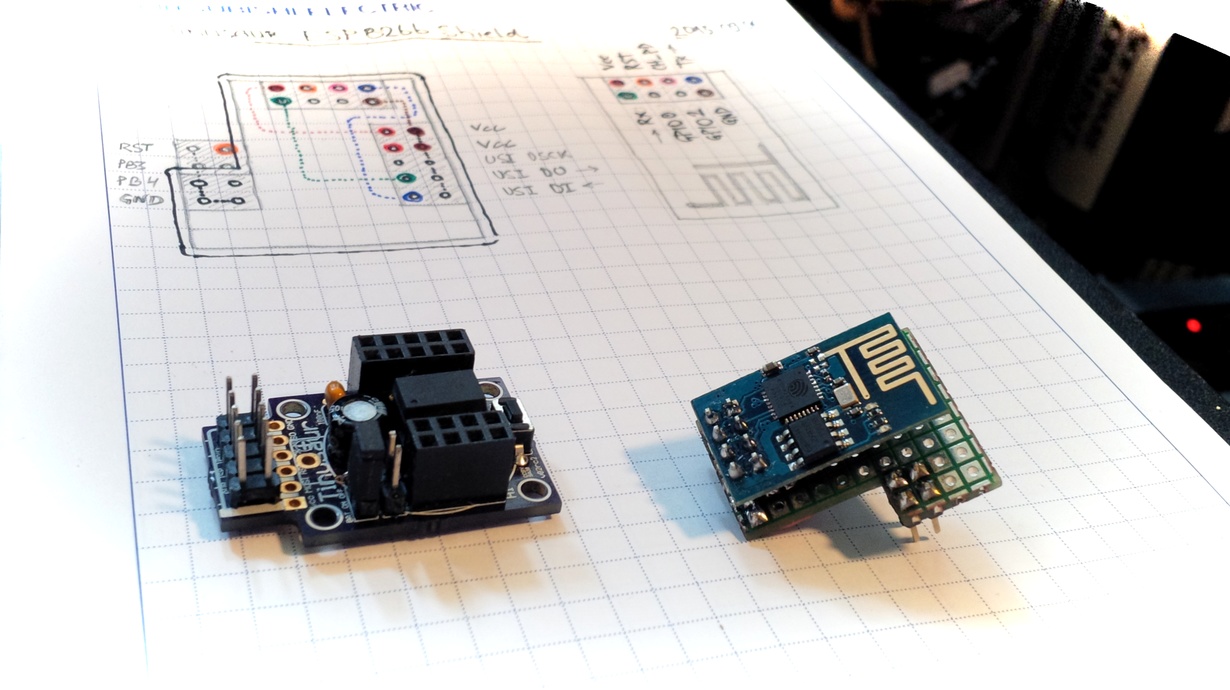
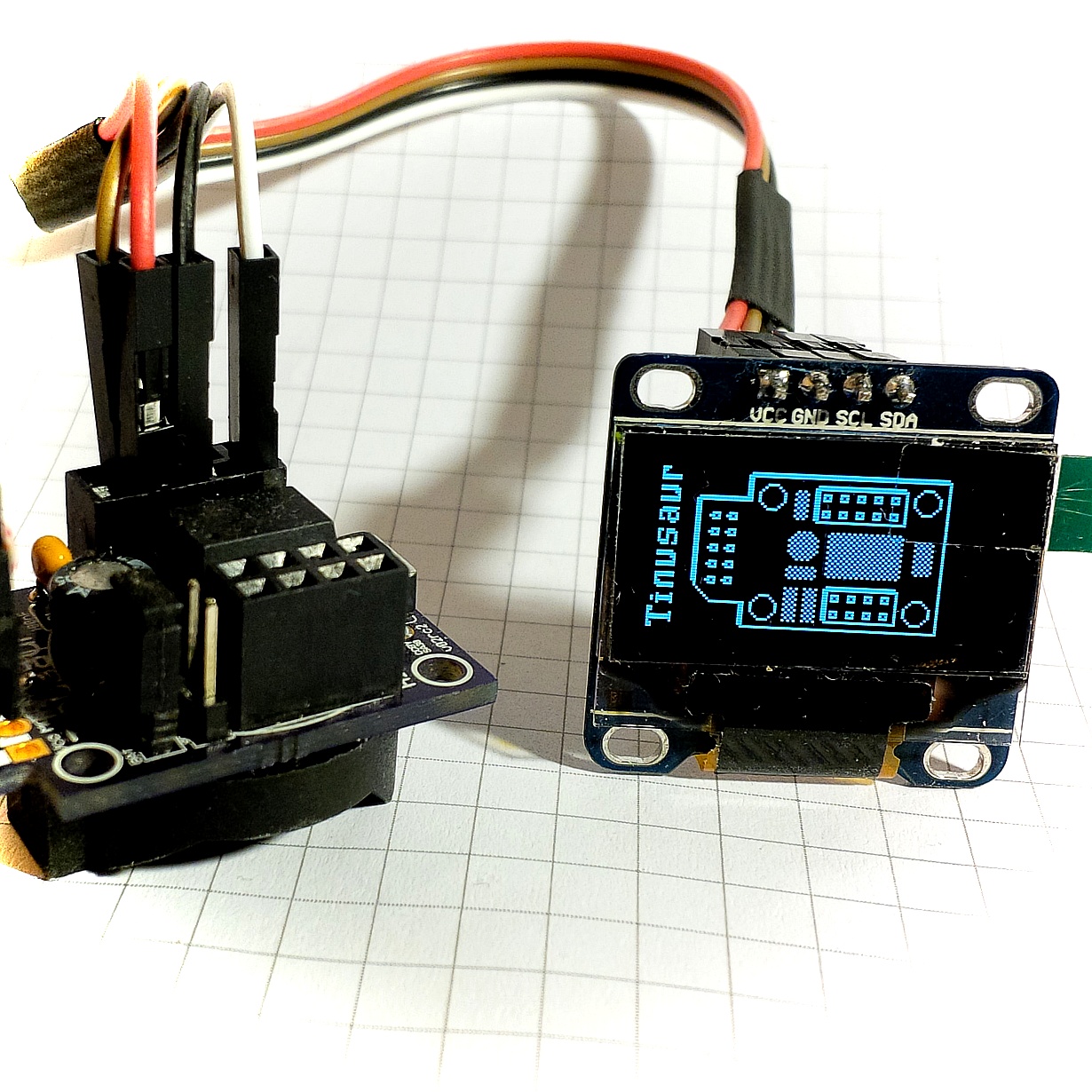
UPDATE: There is an updated version of the Arduino Setup Guide at our new website https://tinusaur.com/guides/arduino-ide-tinusaur-setup/ This is a short guide how to setup the Arduino IDE to work with the Tinusaur boards. What it does basically is to make it work with the Atmel ATtiny85/45/25 microcontrollers. The only difference is that it will appear … Read more