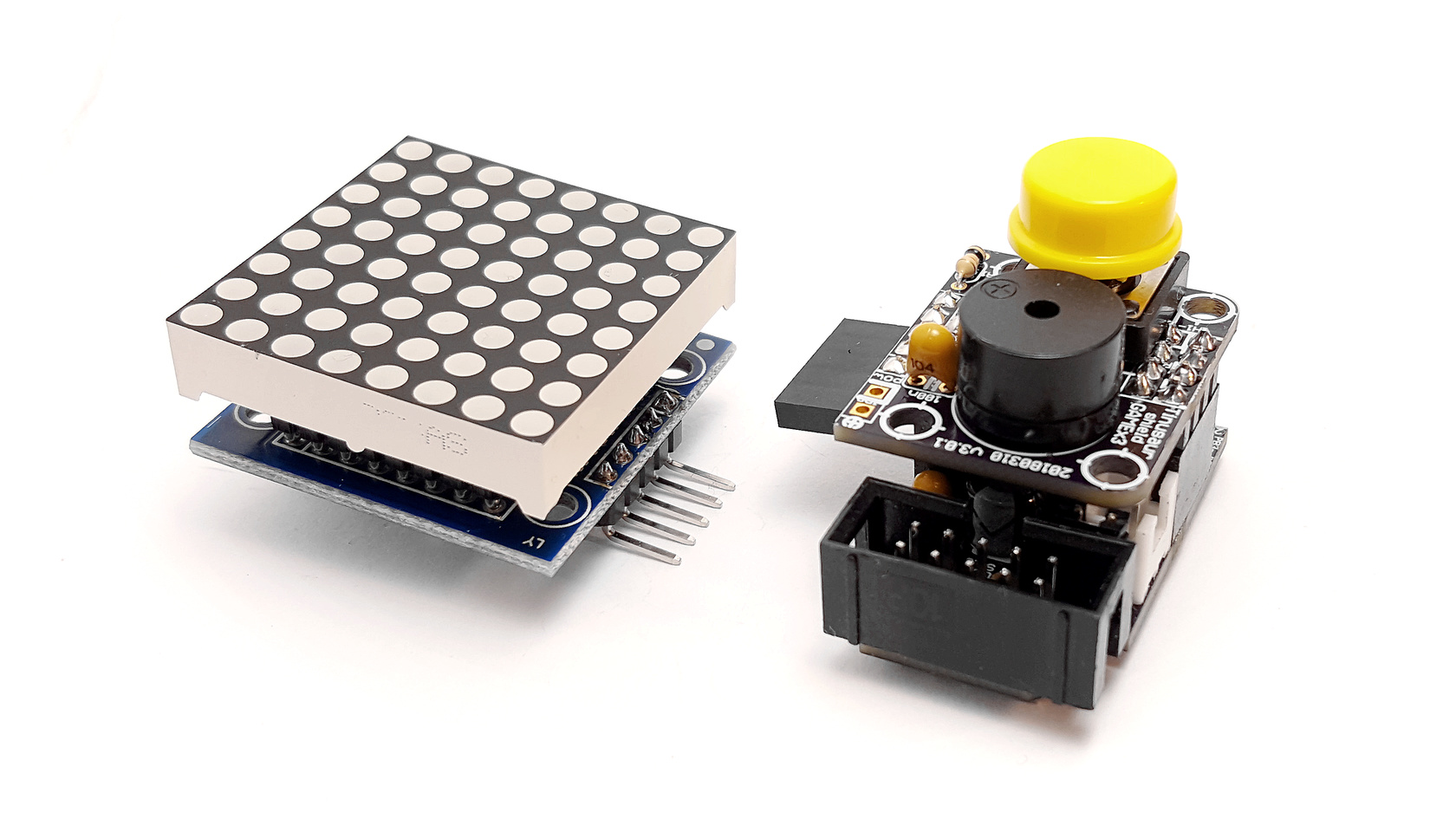
This is an EXPERIMENTAL VIDEO about how to assemble the Tinusaur Board and learn how to solder.
A better version will be available very soon.
What’s our goal? To connect a MAX7219 based LED Matrix module to an ATtiny85 microcontroller and control the LEDs. Doesn’t sound very complicated, right? The Titorial We wrote a short tutorial about how MAX7219 modules work, how to connect them to ATtiny85, and how to write a simple library to work with them Continue reading the MAX7219 ATtiny85 tutorial here. Please, leave … Read more
UPDATE 2022: The MAX7219LED8x8 library, now renamed to MAX7219tiny has now a new home at tinusaur.com/libraries/max7219tiny. Check also this MAX7219 & ATtiny85 tutorial to learn how the library works. The MAX7219 controller manufactured by Maxim Integrated is a compact, serial input/output common-cathode display driver that could interface microcontrollers to 64 individual LEDs, 7-segment numeric LED displays of up to 8 digits, bar-graph … Read more
This is an EXPERIMENTAL VIDEO about how to assemble the Tinusaur Board and learn how to solder.
A better version will be available very soon.
So far we’ve used a LED as output to produce light of different colors and intensity (Tutorial 001 and Tutorial 002) but we haven’t generated any sound yet. In fact, that isn’t very difficult to do. We will use a buzzer for output. According to Wikipedia … the buzzer or beeper is an audio signaling device, which may be mechanical, electromechanical, … Read more
Another beginners tutorial is on the way – this time about a fading in and out LED. This is simple tutorial that shows how to connect a LED to the ATtiny85 based Tinusaur board and write a program that makes the LED to fade in and out using PWM (pulse-width-modulation) technique. Note: The code in this tutorial does not use the … Read more
Our first tutorial Tutorial 001: Blinking LED (that’s the older one) was just updated and put under the Tutorials menu. This is very simple tutorial that shows how to connect a LED to the Tinusaur board and write the “Hello World” of the microcontrollers – very simple program that makes a LED to blink. Since the Tinusaur … Read more
UPDATE: New version of this tutorial is available on the Tutorial 001: Blinking LED x1 page. This is a very simple tutorial on how to make a LED blinking. Since the Tinusaur board is a very standard ATtiny breakout board this could be applied to almost any such other board. The code was tested to work with … Read more