Working with BMP180 Pressure Sensor and ATtiny85 using USITWIX Library
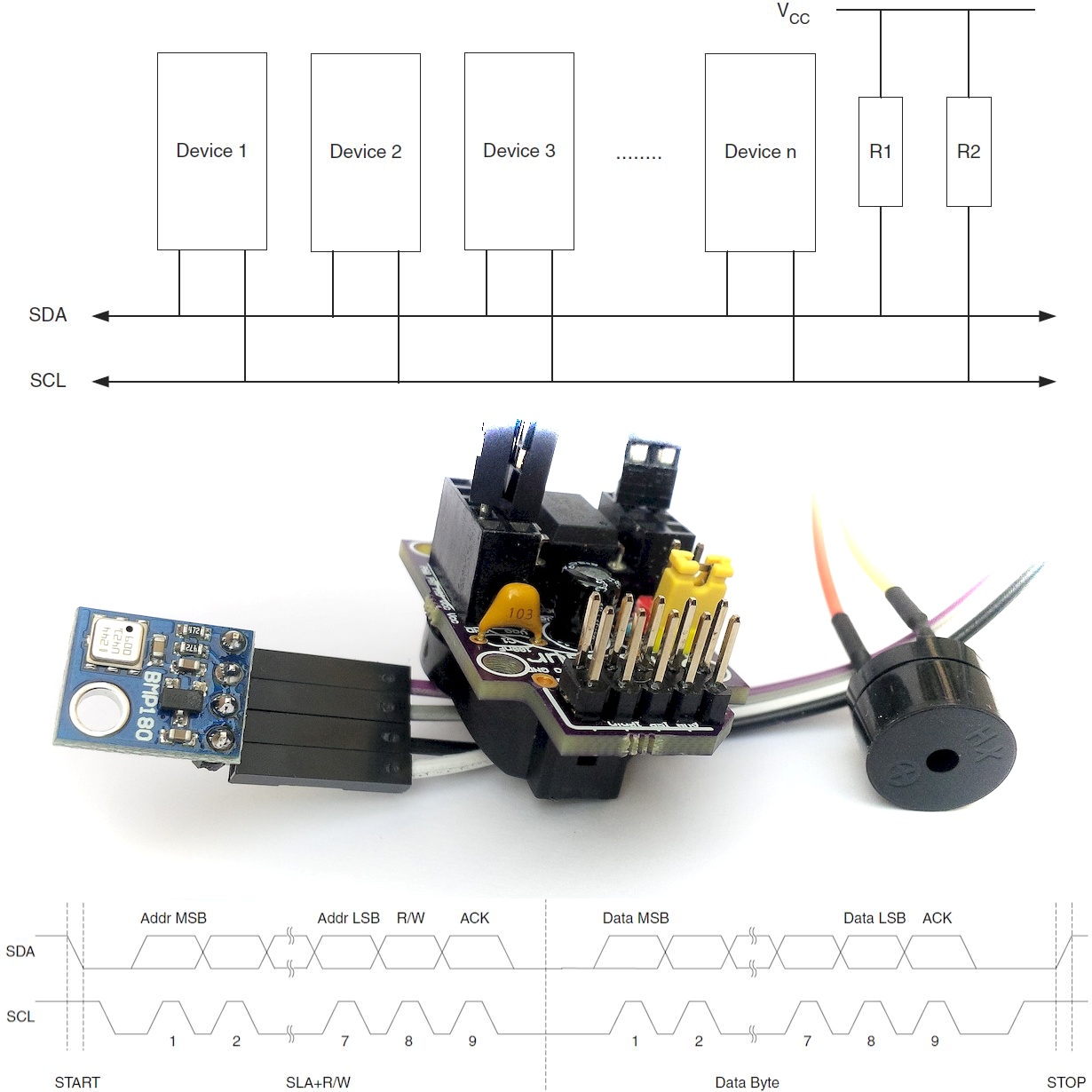
In our previous post “USITWIX – Using UART as TWI / I2C” we looked at the USITWIX library that implements TWI / I2C communication between а ATtiny85 micro-controller and peripherals. Let’s see now how we can use that library to work with the BOSCH BMP180 atmospheric pressure sensor and a ATtiny85/Tinusaur boards. The BMP180tiny Library So, we wrote a simple library (called it BMP180tiny) that uses USITWIX to read and … Read more