CARTINU – Small Robot Car, Powered by the Tinusaur – ATtiny85 Board
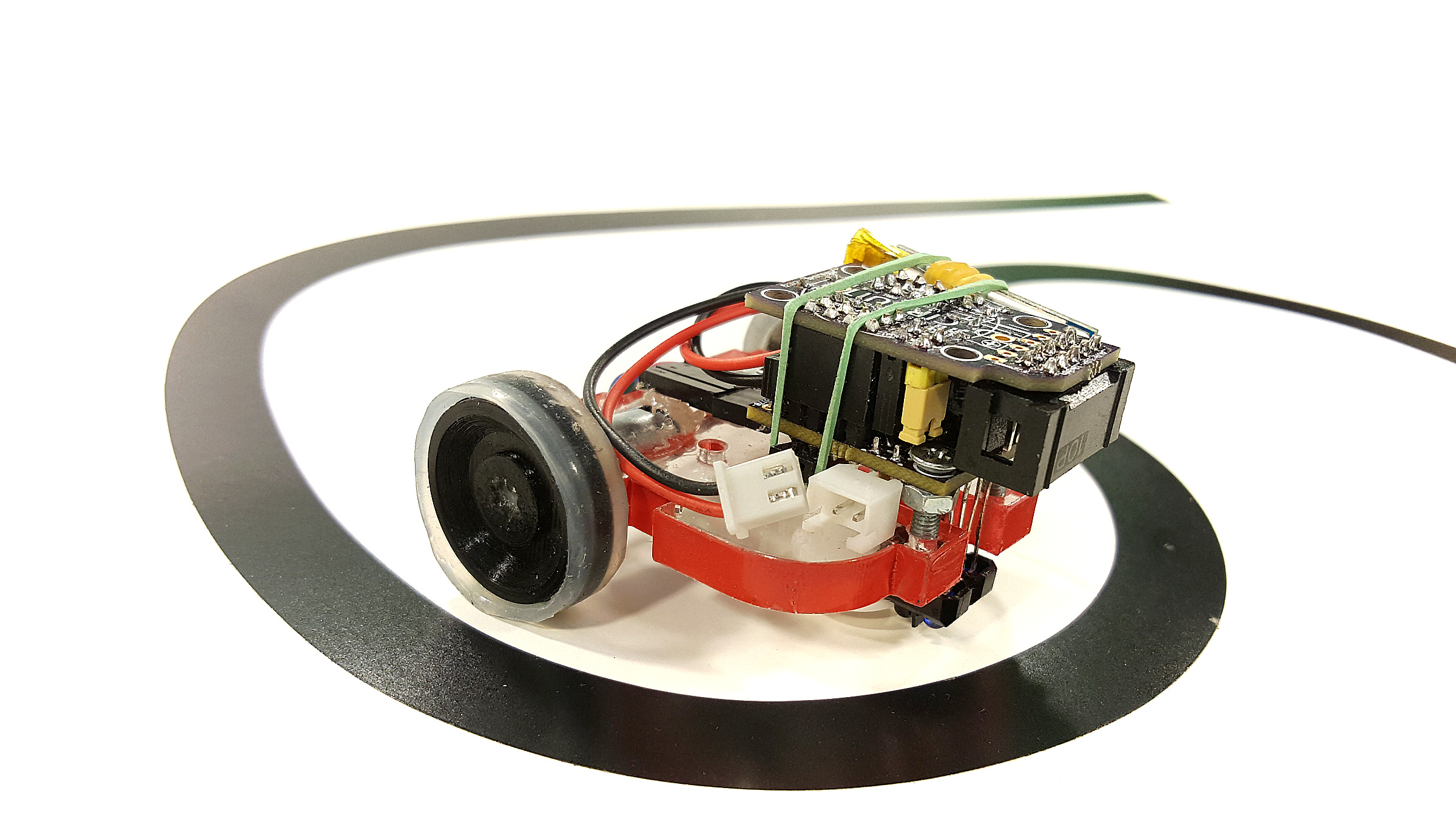
The Cartinu is a small robot car that you could build yourself. But don’t worry! It isn’t that complicated – this circuit, is so simple, that there are very few things that could go wrong. The “brain” of the Cartinu is the Tinusaur board that is powered by the popular Atmel ATtiny85 microcontroller. Once your Cartinu is ready … Read more
