New Product: Tinusaur Shield LEDx2
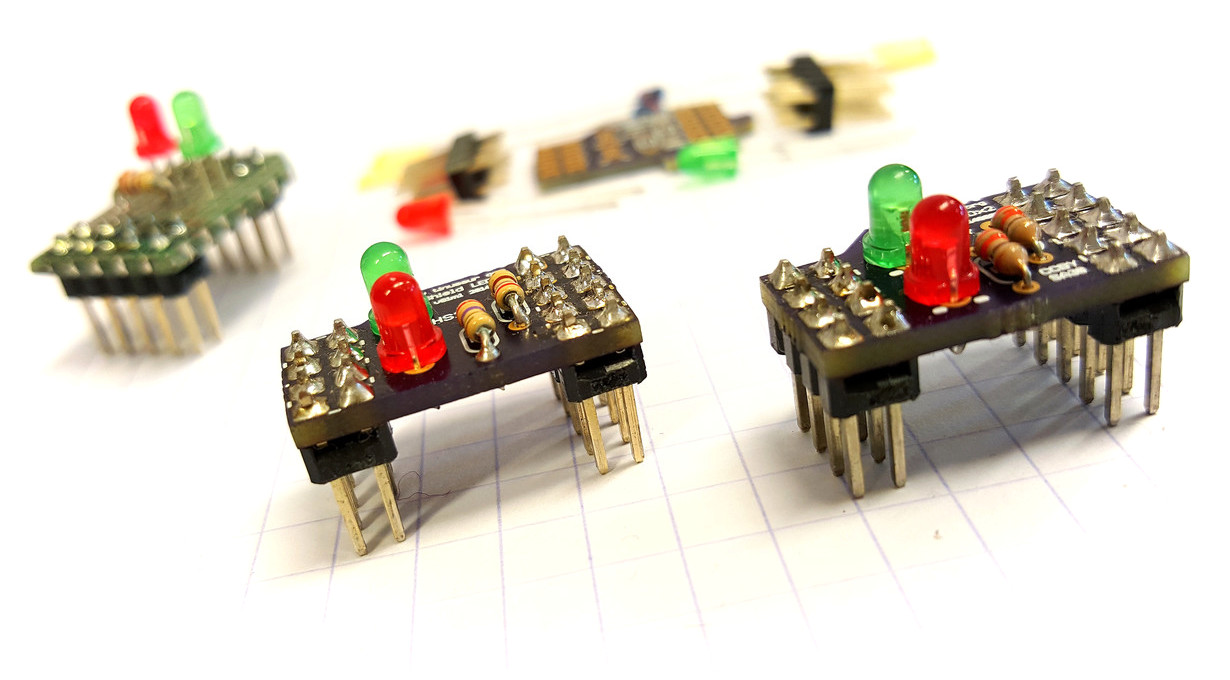
As we’ve mentioned earlier (What is happening with this project?) we were working on shield-like add-on board for the Tinusaur Board. So here it is … It has only 2 LEDs and 2 resistors for each LED so no much to solder. This shield aims at 2 things – making it easier to … Solder 2 LED … Read more